La coexistencia de la vida silvestre y las prácticas agrícolas ha planteado durante mucho tiempo desafíos para la conservación de la vida silvestre, especialmente cuando surgen conflictos.
por PeerJ
La depredación del ganado es un excelente ejemplo de tales conflictos, que requieren estrategias de gestión eficaces que minimicen el conflicto entre humanos y vida silvestre al tiempo que preservan los valiosos recursos agrícolas.
Un nuevo estudio publicado en PeerJ , titulado «Integrating Robotics into Wildlife Conservation: Testing Improvements to Predator Deterrents through Movement», explora la integración de la robótica y las prácticas agrícolas para desarrollar elementos disuasorios de depredadores más eficientes.
El estudio aprovechó los conceptos de la robótica, específicamente el movimiento automatizado y la adaptabilidad, para mejorar la eficacia de los elementos disuasorios de los depredadores. Los investigadores emplearon un sistema modelo usando una colonia de coyotes cautivos y simularon eventos de depredación con cebos de carne tanto dentro como fuera de las zonas protegidas . Dentro de las zonas protegidas, los investigadores utilizaron un dispositivo de disuasión de depredadores de última generación disponible en el mercado llamado Foxlight, montado en un vehículo a control remoto.
El estudio probó tres disuasivos: (1) solo luz, sin movimiento ni adaptabilidad; (2) movimiento predeterminado, con movimiento pero sin adaptabilidad; y (3) movimiento adaptativo, que incorpora tanto el movimiento como la adaptabilidad.
VER: Proteger árboles grandes para la vida silvestre también beneficia al clima, dice estudio
La supervivencia de la carne cebada fue consistentemente mayor dentro de las zonas protegidas, y los tres tratamientos de movimiento demostraron mejoras incrementales en el tiempo de supervivencia en comparación con la línea de base, excepto por el tratamiento de solo luz en la zona no protegida. La incorporación de un movimiento predeterminado duplicó efectivamente la eficacia del tratamiento de solo luz, tanto dentro como fuera de la zona protegida. Además, la incorporación del movimiento adaptativo aumentó exponencialmente el tiempo de supervivencia de los cebos, independientemente de su ubicación.
Los hallazgos de este estudio brindan evidencia convincente de que la integración de las capacidades robóticas existentes, como el movimiento predeterminado y adaptativo, puede mejorar significativamente la protección de los recursos agrícolas y contribuir al desarrollo de herramientas no letales para el manejo de la vida silvestre . Además, la investigación enfatiza la importancia de combinar prácticas agrícolas, como la gestión espacial del ganado durante la noche, con tecnologías innovadoras para mejorar la eficacia de los elementos de disuasión de la vida silvestre.
VER: Primer experimento mundial que usa drones para controles de salud de la vida silvestre
Los hallazgos del estudio tienen implicaciones significativas para la conservación de la vida silvestre , ya que destacan la importancia de adoptar los avances tecnológicos para abordar los conflictos entre humanos y vida silvestre. La integración de la robótica en las prácticas agrícolas ofrece un camino prometedor hacia la coexistencia sostenible y la preservación de la biodiversidad.
Más información: Stewart W. Breck et al, Integración de la robótica en la conservación de la vida silvestre: prueba de mejoras para disuadir a los depredadores a través del movimiento, PeerJ (2023). DOI: 10.7717/peerj.15491
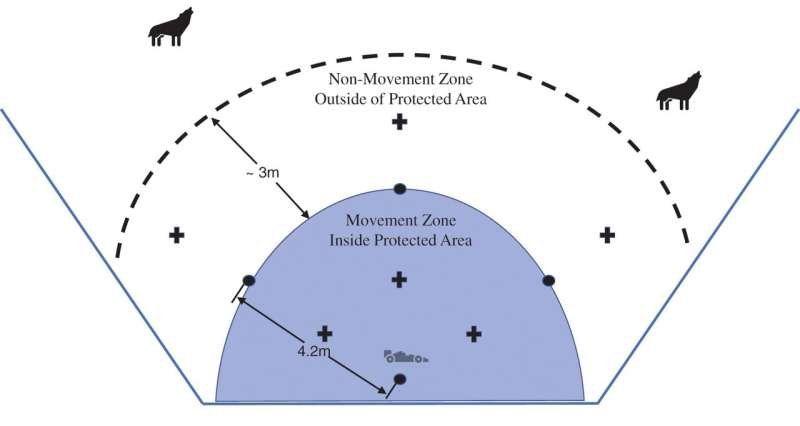
*Leyenda de foto: La arena experimental establecida en cada corral de coyotes. El automóvil representa el vehículo disuasorio en la estación base, los signos más son montones de cebo y los círculos representan las estacas marcadoras, con cebos colocados dentro o fuera de la zona de movimiento. La zona de movimiento representa el área donde se permitió que el vehículo se moviera (predeterminado o adaptativo) y la línea punteada indica la línea de activación disuasiva donde comenzamos los movimientos adaptativos si un coyote cruzaba esta línea. El vehículo RC permaneció/regresó a la estación de origen cuando no estaba en uso (ruta predeterminada o persecución adaptativa). Crédito: PeerJ (2023). DOI: 10.7717/peerj.15491